
技术文章
Technical articles 热门搜索:
安科瑞 BD-AI 单相电流变送器
安科瑞 PZ72-DI 单相数字式电流表
PZ96-E4/C安科瑞 数字式多功能表 数显表
AKH-0.66系列电流互感器——安科瑞
安科瑞 ACR330ELH 多功能网络测控仪表
PZ80-E4/C安科瑞 PZ80-E4/C 交流多功能表
Acrel-AMB1000精密配电监控系统
ADW300/4G4G通讯多功能表
AMC16-DETT基站计量模块
AcrelCloud-3200预付费售电系统
安科瑞 ACR320E 多功能电力仪表
安科瑞 Acrel-5000能源管理与能耗分析系统
安科瑞 WH03-11/HH 导轨安装温湿度控制器
安科瑞 数据中心/通信基站电源监控系统集成解决方案
安科瑞 光伏电站电力监控装置及系统集成
ATE200高压柜无线测温传感器
热门搜索:
安科瑞 BD-AI 单相电流变送器
安科瑞 PZ72-DI 单相数字式电流表
PZ96-E4/C安科瑞 数字式多功能表 数显表
AKH-0.66系列电流互感器——安科瑞
安科瑞 ACR330ELH 多功能网络测控仪表
PZ80-E4/C安科瑞 PZ80-E4/C 交流多功能表
Acrel-AMB1000精密配电监控系统
ADW300/4G4G通讯多功能表
AMC16-DETT基站计量模块
AcrelCloud-3200预付费售电系统
安科瑞 ACR320E 多功能电力仪表
安科瑞 Acrel-5000能源管理与能耗分析系统
安科瑞 WH03-11/HH 导轨安装温湿度控制器
安科瑞 数据中心/通信基站电源监控系统集成解决方案
安科瑞 光伏电站电力监控装置及系统集成
ATE200高压柜无线测温传感器
 更新时间:2023-11-22
更新时间:2023-11-22 点击次数:397
点击次数:397
吴柯霓
安科瑞电气股份有限公司 上海嘉定 201801
摘要:针对目前有源滤波器应用于矿区谐波治理时电网频率适应能力较低的问题,针对定采样点数字控制系统提出了一种具有频率自适应能力的谐振控制策略。该策略不仅可以实现对电网频率波动的自适应,提高滤波器补偿效果,而且不需要在线对控制器参数进行更新,算法简单。*后通过实验验证了所提方法的可行性和有效性。
关键词:矿区谐波治理;有源滤波器;频率波动;自适应
0引言
随着电力电子技术的快速发展,以晶闸管为代表的相控整流装置在矿业生产中得到越来越广泛的应用。然而,相控整流器在运行时会在电网中产生大量谐波,尤其是矿区电网通常位于相对偏远的地区,电网等效阻抗较大,谐波电流的注入会导致机端电压的进一步畸变,严重影响到矿区电网的质量,威胁到敏感用电负荷的安全运行,给整个矿区的生产带来安全隐患。
采用安装无源滤波器的方法一定程度上可实现滤波的作用,但是其滤波效果会受到电网等值阻抗等参数的影响,此外,在参数选择不合适时可能引发谐振,导致滤波器烧毁。与无源滤波器相比,以IGBT为开关元件的有源滤波器(APF)具有多种优点,比如补偿效果不受电路参数影响、可选次谐波滤除等,近年来在矿区电网中的应用越来越广泛。
为了提高有源滤波器对谐波指令的跟踪精度,目前通常采用基于内模原理的谐振控制器。谐振控制器具有对谐振频率处交流信号无静差跟踪的能力,然而,实际中电网的频率并非固定不变,而是在50Hz(对我国电网来讲)附近波动,通常波动范围为±0.5Hz。实际中电网频率的波动将导致谐振控制器的频率与实际谐波频率不一致,降低控制器的跟踪能力,进而影响到有源滤波器的谐波补偿效果。为此,本文针对定采样点APF控制系统,提出了一种具有电网频率自适应能力的谐振控制器数字算法。由于充分利用了定采样点控制系统的特点,在实现频率自适应的同时,保证了谐振控制算法中参数的常数化,即无需在电网频率变化时对控制参数进行调整,不仅算法简单,而且增强了APF对电网频率的鲁棒性。*后通过实验验证了改进控制策略的可行性和有效性。
1APF控制系统的数学模型与比例系数设计
三相APF的主电路及自然坐标系下的电流控制原理如图1所示。三相MPR控制器的输出首先与对应相的电网电压叠加在一起构成电网电压前馈,再和三角载波进行比较生产各开关管的PWM信号。
假设三相系统对称,此时可将三相系统等效为3个独立的单相系统进行建模,以A相为例,此时根据图1可得自然坐标系下APF的输出电流控制框图。
如图2所示

图1APF系统中电流谐振控制原理
uga、ugb、ugc,三相电源电压Lf、Rf,并网滤波电感及其等值电阻iga、igb、igc,APF的三相输出电流Udc、直流侧电压MPR、多谐振控制器iga、ref、igb、ref、igc、ref,APF的三相输出电流给定,其中包含了控制直流侧电压平均值恒定所需的有功电流分量和谐波电流指令。

图2自然坐标系下APF输出电流控制框图GMPR(s)
GMPR(s):多谐振控制器的传递函数,Gd(s):数字控制和PWM调制引入的延时传递函数,通常取1.5个开关周期GL(s)被控对象传递函数,即APF输出滤波电感

式中Ts———采样周期。
本文APF在1个基波周期的采样点数为200,对应的采样周期Ts=0.0001s。
多谐振控制器的主要作用是在相应谐振频率下提供较大增益,使得系统的稳态误差较小,为了保证系统在暂态过程中的响应速度,实际中应将多谐振控制器与比例控制器并联使用。由于系统的响应速度,即系统的开环穿越频率基本不受多谐振控制器的影响,其主要受比例系数的影响,因此在设计系统开环穿越频率时可以不考虑多谐振控制器,仅仅考虑比例控制器的作用,根据图2可得此时系统的开环传递函数为:

式中Kp——比例系数。
对于数字控制的电力电子变流器,综合考虑系统的稳定裕度和动态响应速度,通常将系统的开环穿越频率设置为采样频率的1/10。文中APF系统的主要参数:

根据以上参数,结合式(1)、式(2)和式(3)可知,将系统的开环穿越频率设置在1kHz时,应取比例系数Kp=3.1,此时系统的开环bode图如图3所示。

图3仅比例控制器下APF开环控制系统的bode图
2传统和改进选振控制器的离散域描述及其电网频率鲁棒性分析
(1)传统PR控制器的离散域描述及其电网频率鲁棒性分析
单一的谐振控制器能够在其谐振频率下提供较大的增益可大幅提高控制系统对谐振频率下交流信号的跟踪能力。其在,s域下可表示为:

在数字控制系统中,首先要将式(4)所描述的PR控制算法进行离散化。需要注意的是,不同的离散化算法对PR控制器的性能会有较大影响,比如,采用后向差分或双线性变换对式(4)进行离散化时会导致谐振峰偏移,且这种影响随着PR控制器谐振频率的增大而增大,因此,实际中多采用预修正的Tustin变换对式(4)进行离散化,从而避免离散化后PR控制器谐振峰的偏移。采用预修正Tustin变换时s域到z域的映射关系。

将式(5)代入到式(4)可得传统谐振控制器的离散域描述

式(6)和式(7)表明,传统的谐振控制器离散城算法中包含了采样周期T、以及谐振频率,对于定采样频率APF控制系统来讲,由于T是不变的,PR控制器的谐振频率只与有关。如果在控制中采用恒定的,当实际中电网频率出现波动时,两者将出现偏差,从而降低谐振控制器的跟踪性能。以谐振频率为7次谐波为例,传统PR的幅频特性如图4所示。可见当电网频率为理想的50Hz时控制器在350Hz处具有非常大的增益,说明此时PR控制器对7次谐波的跟踪能力较强,但是当电网频率在+0.5Hz范围内波动时,将导致7次谐波的频率在+3.5Hz范围内波动。由图4中谐振频率附近的放大图可知。随着电网频率的波动,PR控制器的增益将发生剧烈变化,比如在346.5Hz及353.5Hz处的增益下降至接近0。说明此时APF系统对7次谐波的跟踪能力大幅下降。可见传统的PR控制器对电网频率的鲁棒性较低,电网频率微小的波动可能导致APF补偿效果大幅下降。

(2)改进PR控制器的离散域描述及其电网频率鲁棒性分析
目前并网变流器的数字控制系统主要有定采样频率控制系统和定采样点数控制系统2种。对于定采样点数控制系统来讲,即使电网频率发生波动,通过锁相环的调节作用也可保证1个工频周期的采样点数不变。为了充分利用固定基波周期采样点数控制系统的特点,此处引入改进型PR控制器,其离散域描述为:

本文中APF的控制周期为10kHz,1个工频周期的采样点数n=200。式(8)表明,在定采样点数控制系统中,改进后PR控制器数字化算法中的所有参数均为常数,即当电网频率存在波动时,不必根据变化后的电网频率对PR控制器的谐振频率进行频繁的调节,大大简化了控制系统的结构,实现了PR控制器谐振频率与电网频率的自适应。
以7次谐波为例,电网频率在±0.5Hz范围内波动时PR控制器幅频特性的变化如图5所示,可见当电网频率为50Hz,即7次谐波频率为350Hz时PR控制器的谐振频率为350Hz;当电网频率为49.5Hz,即7次谐波频率为346.5Hz时PR控制器的谐振频率自动减小至346.5Hz;当电网频率为50.5Hz,即7次谐波频率为353.5Hz时PR控制器的谐振频率则自动增大至353.5Hz。可见电网频率的波动不会影响到PR控制器在7次谐波处的增益,即不会影响APF系统对7次谐波的跟踪能力,说明改进的PR控制器对电网频率的鲁棒性较强,电网频率的波动不会影响APF系统的谐波补偿效果。

图5改进PR控制器的电网频率鲁棒性分析
3实验验证
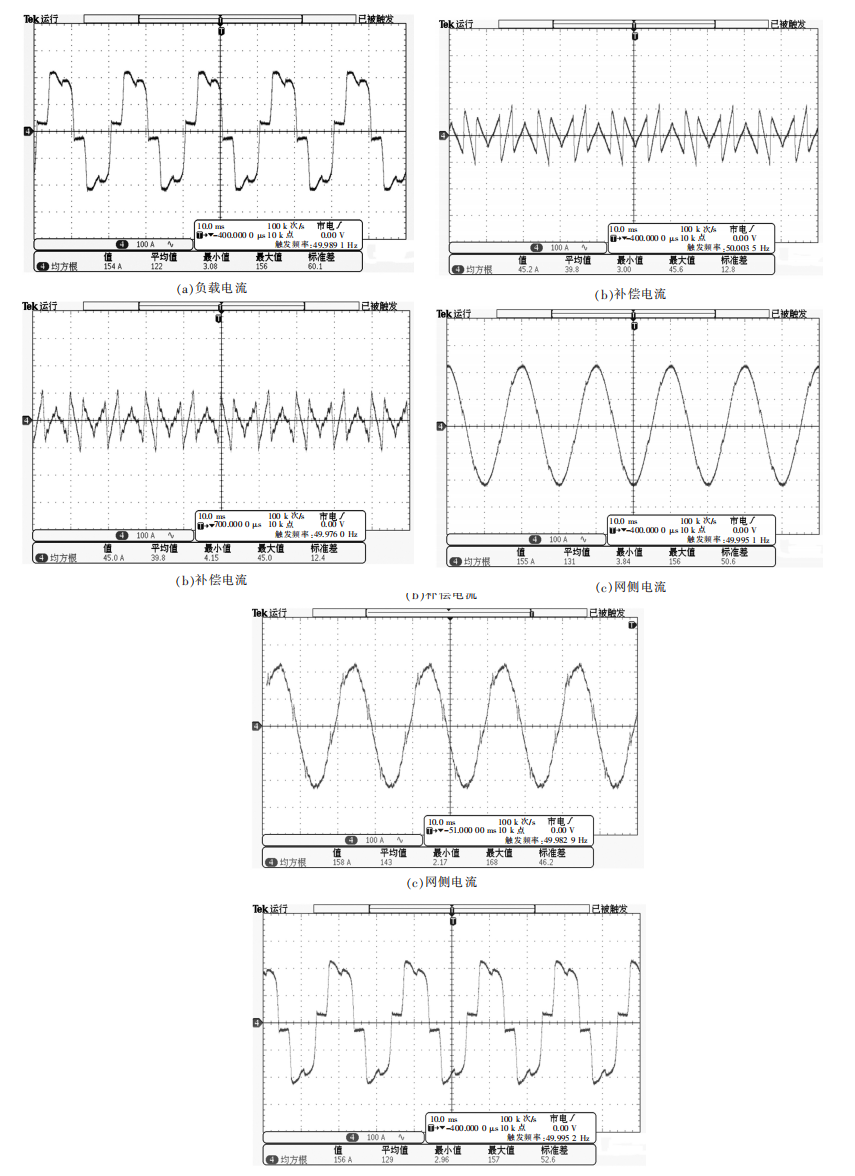
为了进一步验证上述理论分析的正确性,搭建了额定电流为100A的APF实验平台,系统开关频率为10kHz,即系统在1个周波内的采样点数为200由于实验条件限制,实验中无法对电网频率进行修改,鉴于正常工况下电网频率并不是严格的50Hz.因此采用对比的方法验证改进谐振控制策略的有效性。将传统PR控制谐振频率设定为固定的50Hz时的实验结果如图6所示,由图6可见补偿后的网侧电流虽得到一定程度的改善,但是仍含有较大的谐波,通过将示波器数据导出至MATLAB后分析表明,此时网侧电流的THD为8.3%。作为对比,相同工况下采用改进PR控制后的实验结果如图7所示,由图7可见补偿后的网侧电流质量得到明显提高,说明具有频率自适应能力的谐振控制算法对给定指令的跟踪能力较强,此时网侧电流的THD为3.7%。
上述仿真和实验结果验证了改进PR控制算法的有效性。
4 安科瑞APF有源滤波器产品选型
4.1产品特点
(1)DSP+FPGA控制方式,响应时间短,全数字控制算法,运行稳定;
(2)一机多能,既可补谐波,又可兼补无功,可对2~51次谐波进行全补偿或特定次谐波进行补偿;
(3)具有完善的桥臂过流保护、直流过压保护、装置过温保护功能;
(4)模块化设计,体积小,安装便利,方便扩容;
(5)采用7英寸大屏幕彩色触摸屏以实现参数设置和控制,使用方便,易于操作和维护;
(6)输出端加装滤波装置,降低高频纹波对电力系统的影响;
(7)多机并联,达到较高的电流输出等级;
4.2型号说明

4.3尺寸说明

4.4产品实物展示

ANAPF有源滤波器
5安科瑞智能电容器产品选型
5.1产品概述
AZC/AZCL系列智能电容器是应用于0.4kV、50Hz低压配电中用于节省能源、降低线损、提高功率因数和电能质量的新一代无功补偿设备。它由智能测控单元,晶闸管复合开关电路,线路保护单元,两台共补或一台分补低压电力电容器构成。可替代常规由熔丝、复合开关或机械式接触器、热继电器、低压电力电容器、指示灯等散件在柜内和柜面由导线连接而组成的自动无功补偿装置。具有体积更小,功耗更低,维护方便,使用寿命长,可靠性高的特点,适应现代电网对无功补偿的更高要求。
AZC/AZCL系列智能电容器采用定式LCD液晶显示器,可显示三相母线电压、三相母线电流、三相功率因数、频率、电容器路数及投切状态、有功功率、无功功率、谐波电压总畸变率、电容器温度等。通过内部晶闸管复合开关电路,自动寻找适宜投入(切除)点,实现过零投切,具有过压保护、缺相保护、过谐保护、过温保护等保护功能。
5.2型号说明

AZC系列智能电容器选型:

AZCL系列智能电容器选型:

5.3产品实物展示

AZC系列智能电容模块AZCL系列智能电容模块
安科瑞无功补偿装置智能电容方案
6结语
本文首先建立了三相APF的数学模型,并对传统PR控制器的电网频率鲁棒性进行了分析,针对传统PR控制器电网频率鲁棒性较低的问题和固定基波周期采样点数控制系统的特点引入了改进的PR控制器离散化算法,该算法不仅实现了PR控制算法中参数的常数化,避免了电网频率变化时对控制算法的频繁调节,而且对电网频率的变化具有自适应性,使得PR控制器的谐振频率能够自动追踪电网频率的变化,从而减小电网频率波动对APF补偿性能的影响。大幅提高谐振控制器对电网频率的鲁棒性,改善矿“区电网的质量,实验结果验证了改进PR控制算法的有效性。
参考文献
[1]唐筠.基于SVPWM算法的三电平有源电力滤波器的电压空间矢量调制策略[J].煤矿机械,2017,38(8):14-127.
[2]侯梁,李博森,井敬.自适应有源滤波器在矿区配电网中的应用研究[J].煤矿机械,2020,41(01):145-148.DOI:10.13436/j.mkjx.202001049.
[3]安科瑞企业微电网设计与应用手册2022.05版.
作者简介
吴柯霓,女,现任职于安科瑞电气股份有限公司。
 当前位置:
当前位置:
